Cuda Path Tracer开发
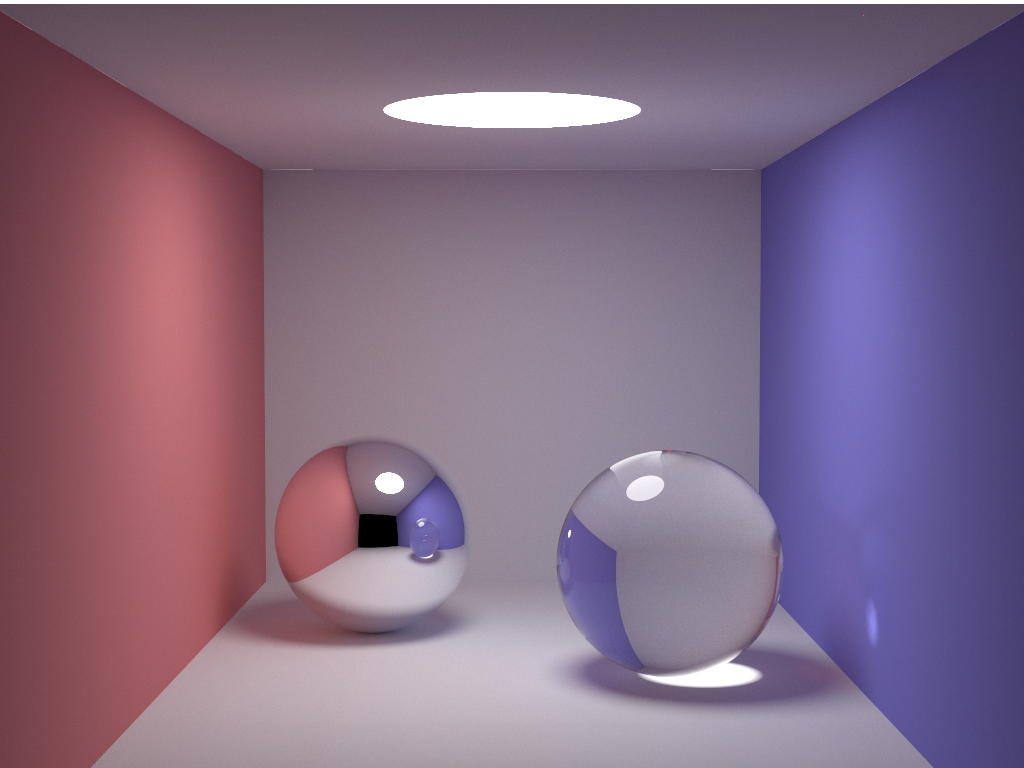
选择smallpt了作为Cuda Path Tracer初尝的借鉴,因此此次主要任务是对smallpt进行Cuda移植,并与好友shawnlu尝试性的做了部分GPU上的优化。代码已开源至smallptCuda
Cuda部分的入门教程较多,可以参考CUDA C/C++ Basics以及An Even Easier Introduction to CUDA
Benchmark
| Config | GTX1080Ti | Intel Xeon E5 (6C12T) 2.80GHz |
|---|---|---|
| Resolution | 1024*768 | 1024*768 |
| SPP | 5000 | 5000 |
| Cost Time | 4.3s | 32min |
| Config | GTX750 | Intel Xeon E5 (8C16T) 2.40GHz |
|---|---|---|
| Resolution | 768*768 | 768*768 |
| SPP | 2048 | 2048 |
| Cost Time | 19.0s | 7.2min |
Cuda部分杂记
Cuda在Windows上会遇到Kernel执行时间过长而被结束进程的问题,可以参考Note中对核函数的监控项进行修改的操作。
本例使用的
helper_math.h可以在Custom Cuda Dir\CUDA Samples\v8.0\common\inc
中找到,Cuda提供了基本的float3, int3之类的包装便于计算。
从OpenMp到Cuda
Cuda的部分难度主要是对于Grid, Block, Thread的理解上, 对于GPU与Cuda的抽象逻辑对应上可以参考Cuda的Threading: Block和Grid的设定与Warp。
总结一下,Warp是组成线程组的基本单位,一般为32,不足32的会以32个线程打包运行(有部分线程不工作,造成浪费),一般而言BlockSize设定为256总体效果都还不错。SM会根据分配的Block消耗资源的多少来分配究竟有多少个Block在SM中。
具体的N卡核心数等属性信息,可自行获取
cudaDeviceProp打印。具体属性值含义可参考cudaDeviceProp Struct Reference
和OpenMp这类CPU上的多核并行不同的是,在线程中并不确定执行顺序,因此需要知晓当前线程对应像素关系就需要threadIdx, blockIdx, blockDim, gridDim等变量来算出。这部分在CUDA C/C++ Basics有简介。
失败的优化
在参考Yining Karl Li的报告后,曾尝试转变原有的基于像素的并行转为基于光线的并行,核心思想就是通过预分配光线,将光线的深度iteration拆分为广度每循环一次加深一层并做stream compaction减少光线数量。
可查看dev分支的历史commit查看具体实现
这里遇到了两个问题
- 未预估到光线的占用内存情况,按照下方的Ray布局一根光线将会占用60B, 取SPP为2048为例每个像素将预分配SPP根光线,需要的显存。
struct Ray
{
float3 origin;
float3 direction;
int depth, pixelIndex;
float3 throughput, L;
};
即便是最简形式的Ray,也仍然占用12B,上述分辨率下也需要占用9G显存,GTX750上的2G显存远远不够(好友的GTX1080ti 12G显存面对45G这样的压力也完全不够)。
struct Ray
{
float3 origin, direction;
};
2.Cuda中Thrust的Stream Compaction本身并行效率很可观(优化原理可参考Yining Karl Li的报告),但此法其实更适合于实时光线跟踪,对于目前的GPU纯计算而言,不仅仅增加了Device与Host之间的带宽开销,增加了多次Kernel启动消耗,更增加了线程需要从Global Memory多次读写数据的开销(且存在线程竞争情况)。甚至降低的光线数量带来的性能优化完全不足以弥补。
// cast all rays we need
initRays<<<A, B>>>();
// Russian Roulette would stop ray
while(1)
{
rayStep<<<C, D>>>();
// reduce the count of ray
streamCompaction();
}
最后dev版本放弃了Stream Compaction,改用如下方式,但初始化分配光线仍然需要巨大资源消耗,且在ray结束迭代需要将结果存入放在Global Memory上的output缓冲区时,需要做原子操作以免出现竞争问题(进一步带来了消耗)。
// cast all rays we need
initRays<<<A, B>>>();
// Russian Roulette would stop ray
rayIterate<<<C, D>>>();
由于相比于基于像素并行带来的额外内存开销,整体性能倒退2x左右。原本只是希望展开GPU线程中忙忙的for(spp)繁重的循环已达到性能优化,但基于光线的并行的确更适合实时光线追踪而非纯GPU渲染。
内存上的优化
并行效率难以优化的前提下,内存优化是突破口。由于GPU的Cache过小,不会做类似CPU上的多级Cache块调入优化,Global Memory类似于CPU上的内存,Shared Memory便可充当Register或Cache的地位(Shared的速度最优情况下接近寄存器),Global与Shared区别可参考Stackoverflow。
这里做的本质上就是手工模拟Cache与内存块交换思想。以如下输出结果至缓冲为例,
__shared__ float3 temp;
temp = // do some assignment;
// output on global memory
output[i] = temp;
先将结果存入shared上的temp,再转入global上的output,思想类似于多级cache(其余sheard部分优化类似)。还对基本的类型做了内存对齐。但由于光线跟踪带宽要求并不高,所以最后结果优化并不明显,不过仍然有1s左右的提升。
| GTX750 | Before | After |
|---|---|---|
| Resolution | 768*768 | 768*768 |
| SPP | 2048 | 2048 |
| Cost Time | 20.517145s | 19.000868s |